The article discusses electric motor torque, covering its four main types: locked rotor torque, pull-up torque, breakdown torque, and full-load torque. It explains how each type affects motor performance, ensuring the motor starts, accelerates, and operates efficiently under different load conditions. Understanding electric motor torque is essential for selecting the right motor for various applications.
An electric motor must produce enough torque to start the load and keep it moving for the motor to operate the load connected to it. A motor connected to a load produces four types of torque. The four types of torque are locked rotor torque (LRT), pull-up torque (PUT), breakdown torque (BDT), and full-load torque (FLT). See Figure 1.
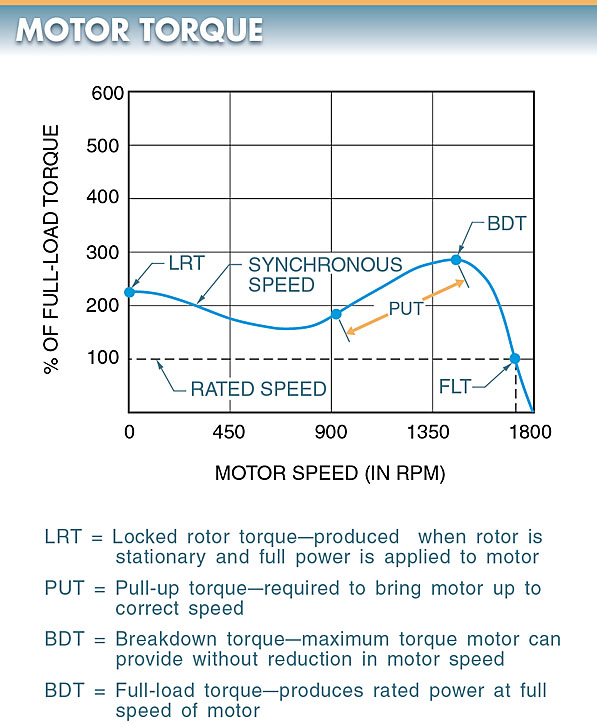
Figure 1. A motor connected to a load produces four types of torque: locked rotor torque (LRT), pull-up torque (PUT), breakdown torque (BDT), and full-load torque (FLT).
Locked Rotor Torque
Locked rotor torque (LRT) is the torque a motor produces when its rotor is stationary and full power is applied to the motor. See Figure 2.
All motors can safely produce a higher torque output than the rated full-load torque for short periods of time. Since many loads require a higher torque to start them moving than to keep them moving, a motor must produce a higher torque when starting the load.
LRT is also referred to as breakaway or starting torque. Starting torque is the torque required to start a motor and is normally expressed as a percentage of full-load torque.
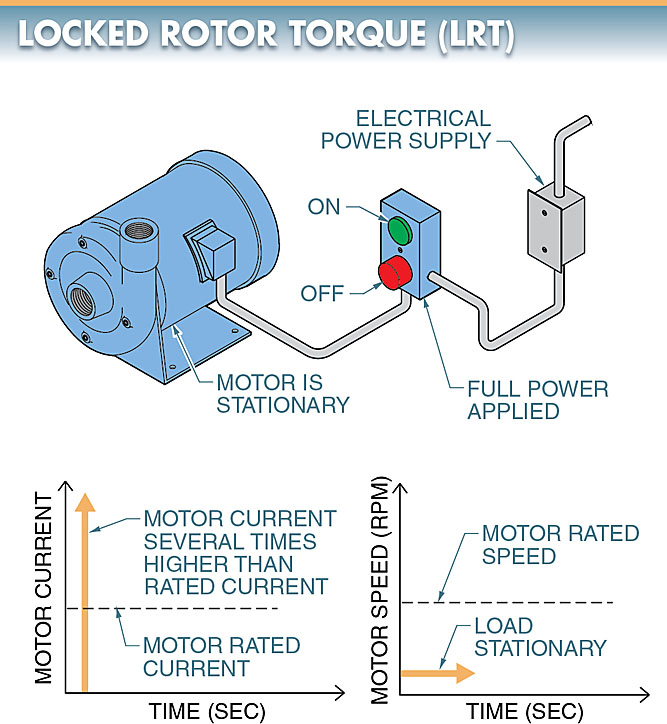
Figure 2. Locked rotor torque (LRT) is the torque a motor produces when its rotor is stationary and full power is applied to the motor.
Pull-Up Torque
Pull-up torque (PUT) is the torque required to bring a load up to its rated speed. See Figure 3. If a motor is properly sized to the load, PUT is brief.
If a motor does not have sufficient PUT, the locked rotor torque may start the load turning but the PUT cannot bring it up to rated speed. Once the motor is up to rated speed, full-load torque keeps the load turning. PUT is also referred to as accelerating torque.
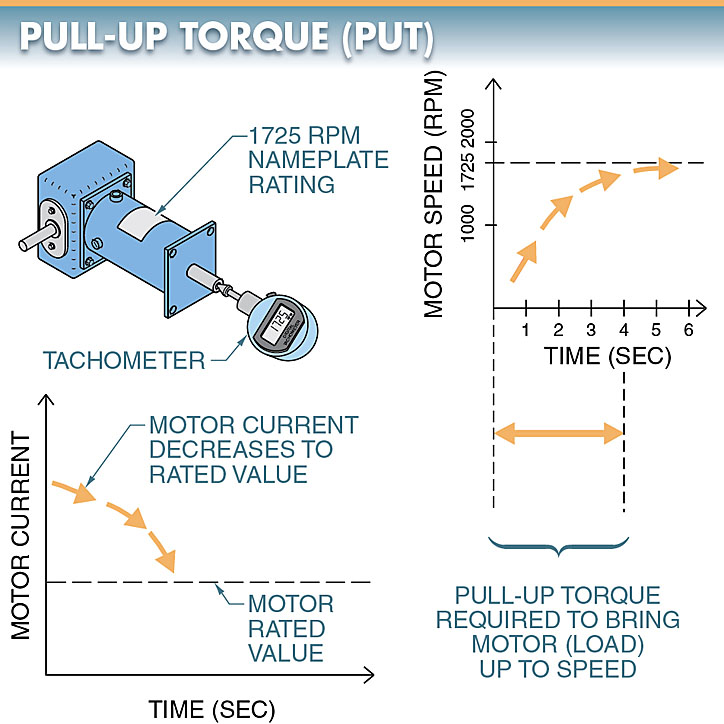
Figure 3. Pull-up torque (PUT) is the torque required to bring a load up to its rated speed.
Breakdown Torque
Breakdown torque (BDT) is the maximum torque a motor can provide without an abrupt reduction in motor speed. See Figure 4.
As the load on a motor shaft increases, the motor produces more torque. As the load continues to increase, the point at which the motor stalls is reached. This point is the breakdown torque.
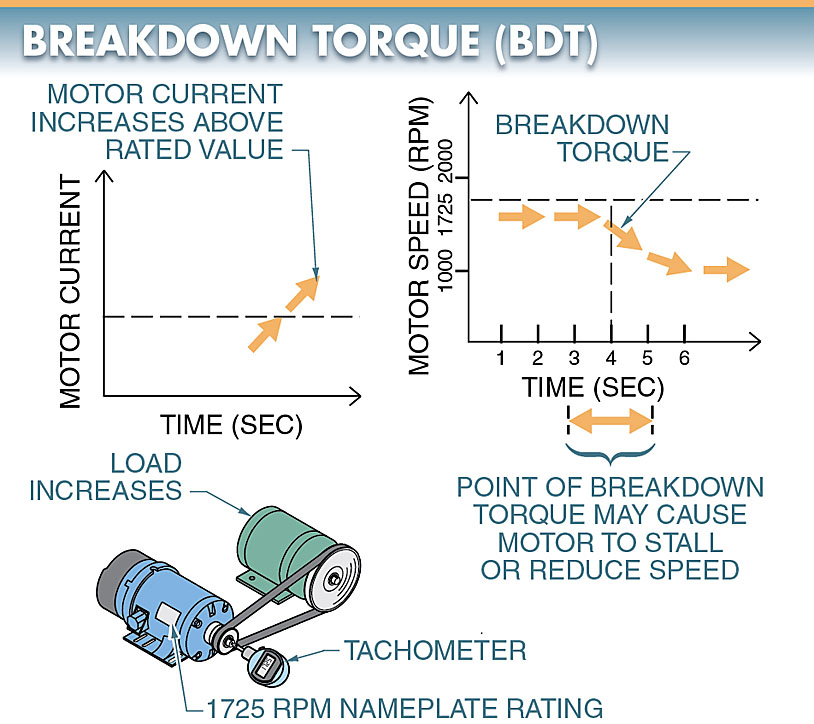
Figure 4. Breakdown torque (BDT) is the maximum torque a motor can provide without an abrupt reduction in motor speed.
Full-Load Torque
Full-load torque (FLT) is the torque required to produce the rated power at the full speed of the motor. See Figure 5.
The amount of torque a motor produces at rated power and full speed (full-load torque) can be found by using a horsepower-to-torque conversion chart.

Figure 5. Full-load torque (FLT) is the torque required to produce the rated power at full speed of the motor.
To calculate motor FLT, the following formula is applied:
\[T=\frac{HP\times 5252}{RPM}\]
Where
T = torque (in lb-ft)
HP = horsepower 5252 = constant
RPM = revolutions per minute
Example: Calculating Full-Load Torque
What is the FLT of a 30 HP motor operating at 1725 rpm?
Solution
\[T=\frac{HP\times 5252}{RPM}=\frac{30\times 5252}{1725}=91.34lb-ft\]
If a motor is fully loaded, it produces FLT. If a motor is underloaded, it produces less than FLT. If a motor is overloaded, it must produce more than FLT to keep the load operating at the motor’s rated speed. See Figure 6.
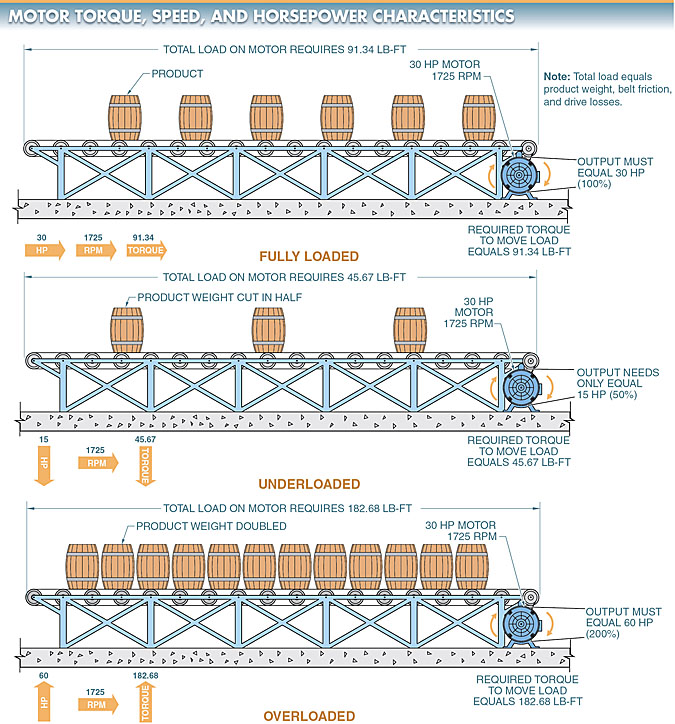
Figure 6. A motor may be fully loaded, underloaded, or overloaded.
For example, a 30 HP motor operating at 1725 rpm can develop 91.34 lb-ft of torque at full speed. If the load requires 91.34 lb-ft at 1725 rpm, the 30 HP motor produces an output of 30 HP.
However, if the load to which the motor is connected requires only half as much torque (45.67 lb-ft) at 1725 rpm, the 30 HP motor produces an output of 15 HP. The 30 HP motor draws less current (and power) from the power lines and operates at a lower temperature when producing 15 HP.
However, if the 30 HP motor is connected to a load that requires twice as much torque (182.68 lb.-ft) at 1725 rpm, the motor must produce an output of 60 HP. The 30 HP motor draws more current (and power) from the power lines and operates at a higher temperature. If the overload protection device is sized correctly, the 30 HP motor automatically disconnects from the power line before any permanent damage is done to the motor.
Electric Motor Torque Key Takeaways
In practical applications, understanding the different types of electric motor torque is essential for ensuring optimal motor performance and efficiency. Locked rotor torque is critical for starting heavy loads, while pull-up torque ensures smooth acceleration to the desired speed. Breakdown torque helps prevent sudden motor failure under peak loads, and full-load torque maintains steady operation at rated conditions. Selecting a motor with the appropriate torque characteristics is crucial for industries such as manufacturing, transportation, and HVAC systems, where motors must handle varying loads efficiently. Proper torque management enhances reliability, prevents equipment damage, and ensures energy-efficient operation in diverse applications.