The article discusses the transient response of second order system, focusing on circuits containing inductors and capacitors either in series or parallel configurations. It outlines the general characteristics of these systems, including the governing second-order differential equations, and explains how parameters like natural frequency and damping ratio influence the system’s response type—overdamped, critically damped, or underdamped.
In general, a second-order circuit has two irreducible storage elements: two capacitors, two inductors, or one capacitor and one inductor. The latter case is the most important in terms of new fundamentals; however, the important aspects of all second-order system responses are discussed in this section.
Since second-order circuits have two irreducible storage elements, such circuits have two state variables and their behavior is described by a second-order differential equation.
The simplest, yet arguably the most crucial, second-order circuits are those in which the capacitor and inductor are either in parallel or in series, as shown in Figures 1 and 2. The circuits in these figures are drawn to suggest that the capacitor and inductor should be treated as a unified load. The rest of each circuit is either the Thevenin or Norton equivalent of the source network.
The analysis of these circuits is somewhat less complicated than for other second-order circuits, which appealing for anyone learning to analyze such circuits for the first time.
General Characteristics
Before diving into the analysis of particular second-order circuits it is worthwhile to introduce the generalized differential equation for any second-order circuit.
$\begin{matrix}\frac{1}{\omega _{n}^{2}}\frac{{{d}^{2}}x}{d{{t}^{2}}}+\frac{2\zeta }{{{\omega }_{n}}}\frac{dx}{dt}+x={{K}_{s}}f\left( t \right) & {} & \left( 1 \right) \\\end{matrix}$
The constants ωn and ζ are the natural frequency and the dimensionless damping ratio, respectively. These parameters are characteristics of a second-order circuit and determine its response. Their values will be determined by direct comparison of equation 1 with the differential equation for a specific RLC circuit.
As will be shown, second-order circuits have three distinct possible responses: overdamped, critically damped, and underdamped. The response for any particular second-order circuit is determined entirely by ζ.
In equation 1, f (t ) is a forcing function. KS is the DC gain of a particular variable x(t). Different variables in the same circuit may have different DC gains. However, all variables share the same natural frequency ωn, the same dimensionless damping ratio ζ, and therefore also the same type of response. This fact can be important time of server when problem solving.
Parallel LC Circuits
Consider the circuit shown in Figure 1. The two state variables are iL and vC, where vC is the primary state variable because it is shared by all four circuit elements.
In general, at the moment of a transient event the energy of the storage elements may be non-zero; that is, the voltage vC (0) across the capacitor and the current iL (0) through the inductor may be non-zero. As always, the two state variables are continuous such that:
$\begin{matrix}{{v}_{C}}\left( {{0}^{+}} \right)={{v}_{C}}\left( {{0}^{-}} \right) & and & {{i}_{L}}\left( {{0}^{+}} \right)={{i}_{L}}\left( {{0}^{-}} \right) \\\end{matrix}$
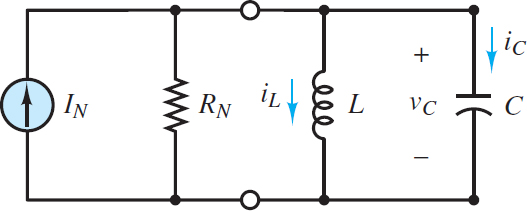
Figure 1 Second-order circuit with the inductor and capacitor in parallel acting as a unified load attached to a Norton equivalent network
Apply KCL to either node to find a first-order differential equation in terms of both state variables.
$\begin{matrix}{{I}_{N}}-\frac{{{v}_{C}}}{{{R}_{N}}}-{{i}_{L}}-{{i}_{C}}=0 & {} & KCL \\\end{matrix}$
The KCL equation can be transformed into a second-order differential equation in iL by recognizing that:
$\begin{matrix}{{v}_{C}}={{v}_{L}}=L\frac{d{{i}_{L}}}{dt} & and & {{i}_{C}} \\\end{matrix}=C\frac{d{{v}_{C}}}{dt}=LC\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}}$
Substitute for vC and iC in the KCL equation to find:
${{I}_{N}}-\frac{L}{{{R}_{N}}}\frac{d{{i}_{L}}}{dt}-{{i}_{L}}-LC\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}}=0$
Rearrange the order of terms to yield:
$LC\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}}+\frac{L}{{{R}_{N}}}\frac{d{{i}_{L}}}{dt}+{{i}_{L}}={{I}_{N}}\begin{matrix}{} & \left( 2 \right) & {} \\\end{matrix}$
Alternatively, one can differentiate both sides of the KCL equation and substitute:
$\begin{matrix}\frac{d{{i}_{L}}}{dt}=\frac{{{v}_{C}}}{L} & and & \frac{d{{i}_{C}}}{dt}=C\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}} \\\end{matrix}$
The result is:
$\frac{d{{I}_{N}}}{dt}-\frac{1}{{{R}_{N}}}\frac{d{{v}_{C}}}{dt}-\frac{{{v}_{C}}}{L}-C\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}}=0$
Multiply both sides of the equation by L, and if the source IN is a constant such that its time derivative is zero, the resulting second-order differential equation is:
$\begin{matrix}LC\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}}+\frac{L}{{{R}_{N}}}\frac{d{{v}_{C}}}{dt}+{{v}_{C}}=0 & {} & \left( 3 \right) \\\end{matrix}$
Equation 3 contains no forcing function (its right side is zero), which indicates that the long-term steady-state solution for vC will be zero. In other words, the transient solution for vC is also its complete solution.
To solve equations 2 and 3 it is first necessary to identify the dimension – less damping ratio ζ and the natural frequency ωn. Notice that the left sides of both equations are identical, as they are for any variable in the circuit. Thus, ωn and ζ can be found from either differential equation by comparing it to equation 1. The result is:
$\begin{matrix}\frac{1}{\omega _{n}^{2}}=LC & and & \frac{2\zeta }{{{\omega }_{n}}} \\\end{matrix}=\frac{L}{{{R}_{N}}}$
These two equations can be solved to yield:
$\begin{matrix}{{\omega }_{n}}=\frac{1}{\sqrt{LC}} & and & \zeta =\frac{1}{2{{R}_{N}}}\sqrt{\frac{L}{C}} & \left( 4 \right) \\\end{matrix}$
The type of transient response for iL and vC depends upon ζ only. When ζ is greater than, equal to, or less than 1, the transient responses (iL)TR and (vC)TR are overdamped, critically damped, or underdamped, respectively. These three types of responses are described in detail later in this section. The complete solutions are:
${{i}_{L}}\left( t \right)={{\left( {{i}_{L}} \right)}_{TR}}+{{\left( {{i}_{L}} \right)}_{SS}}={{\left( {{i}_{L}} \right)}_{TR}}+{{I}_{N}}$
And
${{v}_{C}}\left( t \right)={{\left( {{v}_{C}} \right)}_{TR}}+{{\left( {{v}_{C}} \right)}_{SS}}={{\left( {{v}_{C}} \right)}_{TR}}+L\frac{d{{I}_{N}}}{dt}$
Note that when IN is a constant, (vC )SS = 0 and vC (t) = (vC)TR(t).
Series LC Circuits
The development of the general solution for series LC circuits follows the same basic steps used above for parallel LC circuits. Consider the circuit in Figure 2 and note the duality between what follows and what was done above for the parallel LC circuit. In fact, the equations that follow can be found simply by starting with the equations developed above and swapping L with C, iL with vC , RN with 1/RT , and IN with VT.
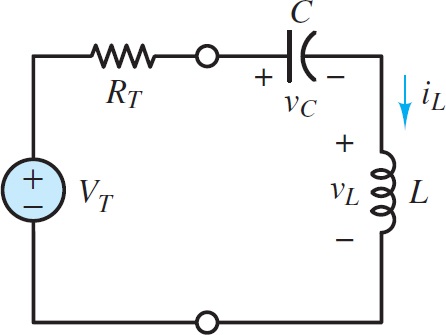
Figure 2 Second-order circuit with the inductor and capacitor in series acting as a unified load attached to a Thevenin equivalent network
Again, the two state variables are iL and vC , where iL is the primary state variable because it is shared by all four circuit elements. Again, at the moment of a transient event the energy of the storage elements may be non-zero; that is, the voltage vC (0) across the capacitor and the current iL (0) through the inductor may be non-zero. As always, the two state variables are continuous such that:
$\begin{matrix}{{v}_{C}}\left( {{0}^{+}} \right)={{v}_{C}}\left( {{0}^{-}} \right) & and & {{i}_{L}}\left( {{0}^{+}} \right) \\\end{matrix}={{i}_{L}}\left( {{0}^{-}} \right)$
Apply KVL around the series loop to find a first-order differential equation in terms of both state variables.
$\begin{matrix}{{V}_{T}}-{{i}_{L}}{{R}_{T}}-{{v}_{C}}-{{v}_{L}}=0 & {} & KVL \\\end{matrix}$
The KVL equation can be transformed into a second-order differential equation in vC by recognizing that:
\[\begin{matrix}{{i}_{L}}={{i}_{C}}=C\frac{d{{v}_{C}}}{dt} & and & {{v}_{L}}=L\frac{d{{i}_{L}}}{dt}=LC\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}} \\\end{matrix}\]
Substitute for vL and iL in the KVL equation to find:
\[{{V}_{T}}-{{R}_{T}}C\frac{d{{v}_{C}}}{dt}-{{v}_{C}}-LC\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}}=0\]
Rearrange the order of terms to yield:
$\begin{matrix}LC\frac{{{d}^{2}}{{v}_{C}}}{d{{t}^{2}}}+{{R}_{T}}C\frac{d{{v}_{C}}}{dt}+{{v}_{C}}={{V}_{T}} & {} & \left( 5 \right) \\\end{matrix}$
Alternatively, one can differentiate both sides of the KVL equation and substitute:
$\begin{matrix}\frac{d{{v}_{C}}}{dt}=\frac{{{i}_{L}}}{C} & and & \frac{d{{v}_{L}}}{dt}=L\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}} \\\end{matrix}$
The result is:
$\frac{d{{V}_{T}}}{dt}-{{R}_{_{T}}}\frac{d{{i}_{L}}}{dt}-\frac{{{i}_{L}}}{C}-L\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}}=0$
Multiply both sides of the equation by C, and if the source VT is a constant such that its time derivative is zero, the resulting second-order differential equation is:
$\begin{matrix}LC\frac{{{d}^{2}}{{i}_{L}}}{d{{t}^{2}}}+{{R}_{T}}C\frac{d{{i}_{L}}}{dt}+{{i}_{L}}=0 & {} & \left( 6 \right) \\\end{matrix}$
Equation 6 contains no forcing function (its right side is zero), which indicates that the long-term steady-state solution for iL will be zero. In other words, the transient solution for iL is also its complete solution.
To solve equations 5 and 6 it is first necessary to identify the dimensionless damping ratio ζ and the natural frequency ωn. Notice that the left sides of both equations are identical, as they are for any variable in the circuit. Thus, ωn and ζ can be found from either differential equation by comparing it to equation 1. The result is:
$\frac{1}{\omega _{n}^{2}}=LC\begin{matrix}{} & and & \frac{2\zeta }{{{\omega }_{n}}} \\\end{matrix}={{R}_{T}}C$
These two equations can be solved to yield:
$\begin{matrix}{{\omega }_{n}}=\frac{1}{\sqrt{LC}} & and & \zeta =\frac{{{R}_{T}}}{2} \\\end{matrix}\sqrt{\frac{C}{L}}\begin{matrix}{} & {} & \left( 7 \right) \\\end{matrix}$
The type of transient response for iL and vC depends upon ζ only. As al- ways, when ζ is greater than, equal to, or less than 1, the transient responses (iL)TR and (vC )TR are overdamped, critically damped, or underdamped, respectively. These three types of responses are described in detail later in this section. The complete solutions are:
${{v}_{C}}\left( t \right)={{\left( {{v}_{C}} \right)}_{TR}}+{{\left( {{v}_{C}} \right)}_{SS}}={{\left( {{v}_{C}} \right)}_{TR}}+{{V}_{T}}$
And
${{i}_{L}}\left( t \right)={{\left( {{i}_{L}} \right)}_{TR}}+{{\left( {{i}_{L}} \right)}_{SS}}={{\left( {{i}_{L}} \right)}_{TR}}+C\frac{d{{V}_{T}}}{dt}$
Note that when VT is a constant, (iL)SS = 0 and iL(t) = (iL)TR(t).
Transient Response
The transient response xTR(t) is found by setting the right side of the governing differential equation equal to zero. That is:
$\begin{matrix}\frac{1}{\omega _{n}^{2}}\frac{{{d}^{2}}{{x}_{TR}}}{d{{t}^{2}}}+\frac{2\zeta }{{{\omega }_{n}}}\frac{d{{x}_{TR}}}{dt}+{{x}_{TR}}=0 & {} & \left( 8 \right) \\\end{matrix}$
Just as in first-order systems, the solution of this equation has an exponential form:
${{x}_{TR}}\left( t \right)=\alpha {{e}^{st}}\begin{matrix}{} & \left( 9 \right) & {} \\\end{matrix}$ Assumed transient response
Substitution into the differential equation yields the characteristic equation:
$\frac{{{s}^{2}}}{\omega _{n}^{2}}+\frac{2\zeta }{{{\omega }_{n}}}+1=0\begin{matrix} {} & {} & \left( 10 \right) \\\end{matrix}$
which, in turn, yields two characteristic roots s1 and s2. Specific values of s1 and s2 are found from the quadratic formula applied to the characteristic equation:
$\begin{matrix}{{s}_{1,2}}=-\zeta {{\omega }_{n}}\pm \frac{1}{2}\sqrt{{{\left( 2\zeta {{\omega }_{n}} \right)}^{2}}-4\omega _{n}^{2}}=-{{\omega }_{n}}\left( \zeta \pm \sqrt{{{\zeta }^{2}}-1} \right) & {} & \left( 11 \right) \\\end{matrix}$
The roots s1 and s2 are associated with the three distinct possible responses: over- damped (ζ > 1), critically damped (ζ = 1), and underdamped (ζ < 1). The details of each of these responses are presented below.
Overdamped Response (ζ > 1)
Two distinct, negative and real roots: (s1, s2).The transient response is over-damped when ζ > 1 and the roots are${{s}_{1,2}}={{\omega }_{n}}(-\zeta \pm \sqrt{{{\zeta }^{2}}-1})$. The general form of the solution is:
${{x}_{TR}}\left( t \right)={{\alpha }_{1}}{{e}^{{{s}_{1}}t}}+{{\alpha }_{2}}{{e}^{{{s}_{2}}t}}={{e}^{-\zeta {{\omega }_{n}}t}}\left[ {{\alpha }_{1}}{{e}^{\left( {{\omega }_{n}}\sqrt{{{\zeta }^{2}}-1} \right)t}}+{{\alpha }_{2}}{{e}^{\left( -{{\omega }_{n}}\sqrt{{{\zeta }^{2}}-1} \right)t}} \right]$
$={{\alpha }_{1}}{{e}^{-t/{{\tau }_{1}}}}+{{\alpha }_{2}}{{e}^{-t/{{\tau }_{2}}}}$
$\begin{matrix}{{\tau }_{1}}=\frac{1}{{{\omega }_{n}}\left( \zeta -\sqrt{{{\zeta }^{2}}-1} \right)} & {} & {{\tau }_{2}}=\frac{1}{{{\omega }_{n}}\left( \zeta +\sqrt{{{\zeta }^{2}}-1} \right)} & (12) \\\end{matrix}$
Thus, an overdamped response is the sum of two first-order responses, as shown in Figure 3.
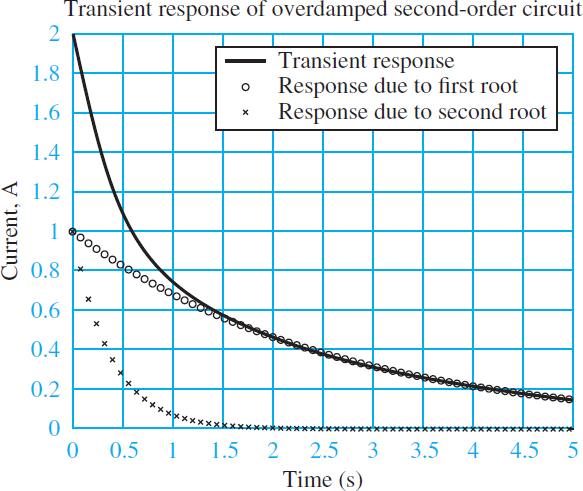
Figure 3 Transient response of underdamped second-order system
Critically Damped Response (ζ = 1)
Two identical, negative, and real roots: (s1, s2). The transient response is critically damped when ζ = 1. The general form of the solution is:
${{x}_{TR}}\left( t \right)={{\alpha }_{1}}{{e}^{{{s}_{1}}t}}+{{\alpha }_{2}}t{{e}^{{{s}_{2}}t}}={{e}^{-{{\omega }_{n}}t}}\left( {{\alpha }_{1}}+{{\alpha }_{2}}t \right)={{e}^{-t/\tau }}\left( {{\alpha }_{1}}+{{\alpha }_{2}}t \right)$
$\begin{matrix}\tau =\frac{1}{{{\omega }_{n}}} & {} & \left( 13 \right) \\\end{matrix}$
Note that a critically damped response is the sum of a first-order exponential term plus a similar term multiplied by t. These two components and the complete response are shown in Figure 4.
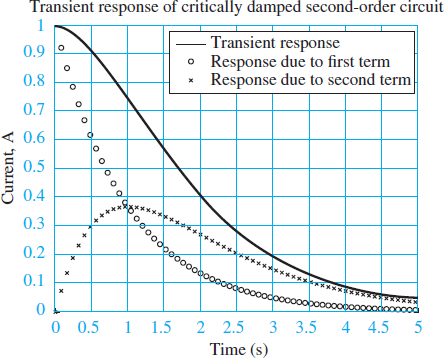
Figure 4 Transient response of a critically damped second-order system
Underdamped Response (ζ < 1)
Two complex conjugate roots: (s1, s2). The transient response is underdamped when ζ < 1. The argument of the square root is negative in equation 11, such that ${{s}_{1,2}}={{\omega }_{n}}\left( -\zeta \pm j\sqrt{1-{{\zeta }^{2}}} \right)$ . The following complex exponentials appear in the general form of the response:
$\begin{matrix}{{e}^{^{{{\omega }_{n}}}\left( -\zeta +j\sqrt{1-{{\zeta }^{2}}} \right)t}} & {{e}^{^{{{\omega }_{n}}}\left( -\zeta -j\sqrt{1-{{\zeta }^{2}}} \right)t}} & \left( 14 \right) \\\end{matrix}$
Euler’s formula can be used to express the complex exponentials in terms of sinusoids. The result is:
$\begin{matrix}{{x}_{TR}}\left( t \right)={{e}^{-\zeta {{\omega }_{n}}t}}\left[ {{\alpha }_{1}}\sin \left( {{\omega }_{d}}t \right)+{{\alpha }_{2}}\cos \left( {{\omega }_{d}}t \right) \right] & {} & \left( 15 \right) \\\end{matrix}$
Where ${{\omega }_{d}}={{\omega }_{n}}\sqrt{1-{{\zeta }^{2}}}$ is the damped natural frequency. Note that ωd is the frequency of oscillation and is related to the period T of oscillation by ωdT = 2π . Also note that ωd approaches the natural frequency ωn as ζ approaches zero. The oscillation is damped by the decaying exponential ${{e}^{-\zeta {{\omega }_{n}}t}}$, which has a time constant$\tau =1/\zeta {{\omega }_{n}}$as shown in Figure 5. As ζ increases toward 1 (more damping), τ decreases and the oscillations decay more quickly. In the limit ζ → 0, the response is a pure sinusoid.
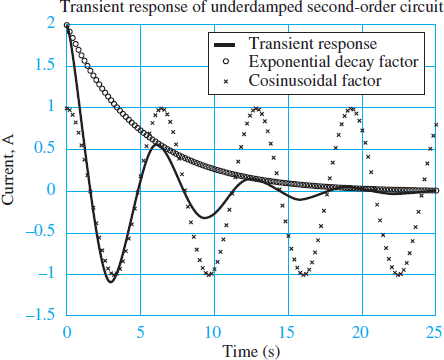
Figure 5 Transient response of an underdamped second-order system for α1 = α2 = 1; ζ = 0.2; ωn = 1
Long-Term Steady-State Response
For switched DC sources, the forcing function F in equation 5.40 is a constant. The result is a constant long-term (t → ∞) steady-state response xSS.
$\begin{matrix}\frac{1}{\omega _{n}^{2}}\frac{{{d}^{2}}{{x}_{SS}}}{d{{t}^{2}}}+\frac{2\zeta }{{{\omega }_{n}}}\frac{d{{x}_{SS}}}{dt}+{{x}_{SS}}={{K}_{s}}F & {} & \left( 16 \right) \\\end{matrix}$
Since xSS must also be a constant the solution for xSS is:
${{x}_{SS}}=x\left( \infty \right)={{K}_{s}}F\begin{matrix}{} & t\to \infty & \left( 17 \right) \\\end{matrix}$
Complete Response
As with first-order systems, the complete response is the sum of the transient and long-term steady-state responses. The complete mathematical solutions for the over- damped, critically damped, and underdamped cases. In each of these cases, the initial conditions on the storage elements must be used to solve for the unknown constants α1 and α2. The required procedure uses the two initial conditions to evaluate x(t) and dx/dt at t = 0+. The details of the procedure vary slightly in each of the three cases and are illustrated in the example problems.
One particularly useful complete solution is the unit-step response brought about by letting KSf (t) be a unit step, which equals 0 for t < 0 and 1 for t > 0. To illustrate, assume a dimensionless damping coefficient ζ = 0.1 and an underdamped period of oscillation T = 2π, such that the damped natural frequency is ωd = 1. The corresponding unit-step response, shown in Figure 6, asymptotically approaches the long-term DC steady-state value of 1 dictated by the unit-step input.
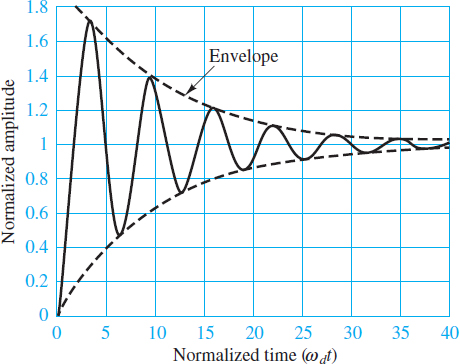
Figure 6 Second order unit step response KS = 1, ωd = 1, and ζ = 0.1
Also, as seen in the underdamped transient response, the magnitude of the oscillation’s decays exponentially over time. The time constant for the surrounding envelope.
Note that the rate of decay of the oscillations is governed by ζ. Figure 7 shows that as ζ increases the overshoot of the long-term DC steady-state response decreases until, when ζ = 1 (critically damped), the response no longer oscillates and the overshoot is zero. The response for ζ < 1 (overdamped) has no oscillations and zero overshoot.
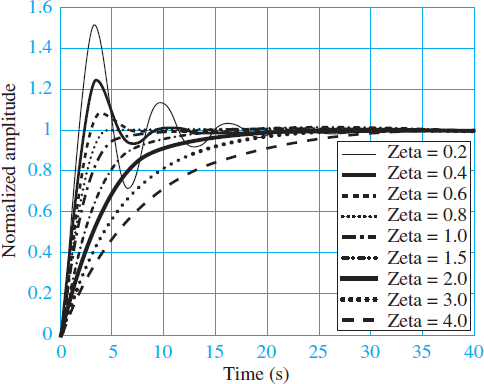
Figure 7 Second-order unit step response KS = 1, ωd = 1, and ζ ranging from 0.2 to 4.0
Second Order System Transient Response Key Takeaways
Understanding the transient response of second-order circuits—particularly those involving inductors and capacitors in series or parallel—is essential for analyzing and designing a wide range of practical electrical and electronic systems. These circuits form the foundation for many applications such as filters, oscillators, signal processing systems, and control circuits. The ability to determine how a system will respond under various damping conditions (overdamped, critically damped, and underdamped) is vital for ensuring stability, accuracy, and desired performance in real-world applications. Moreover, mastering the governing differential equations and key parameters like natural frequency and damping ratio allows engineers to predict and manipulate circuit behavior efficiently, making these concepts critical to both theoretical studies and practical engineering design.